Basic tutorial of how to setup a ADXL345 Accelerometer with the Raspberry Pi.
PARTS:
RPI 3 – https://amzn.to/2VA9pQY
4 Amp Power Adapter – https://amzn.to/2CTptWu
16GB micro SD – https://amzn.to/2SFMwd3
120 pcs jumper cable: https://ebay.to/2VAb9cY
ADXL345 Accelerometer: https://amzn.to/2TUEHjO
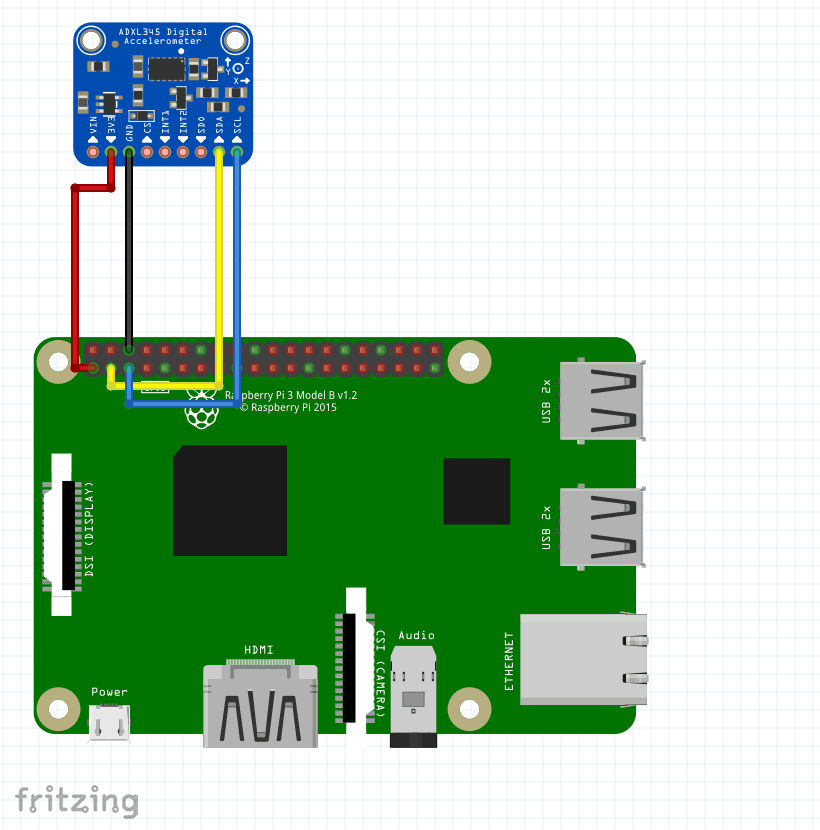
SCHEMATIC:
CODE:
GITHUB LINK: https://github.com/adafruit/Adafruit_Python_ADXL345
Slightly Modified Script:
# Simple demo of of the ADXL345 accelerometer library. Will print the X, Y, Z
# axis acceleration values every half second.
# Author: Tony DiCola
# License: Public Domain
import time
# Import the ADXL345 module.
import Adafruit_ADXL345
# Create an ADXL345 instance.
accel = Adafruit_ADXL345.ADXL345()
# Alternatively you can specify the device address and I2C bus with parameters:
#accel = Adafruit_ADXL345.ADXL345(address=0x54, busnum=2)
# You can optionally change the range to one of:
# - ADXL345_RANGE_2_G = +/-2G (default)
# - ADXL345_RANGE_4_G = +/-4G
# - ADXL345_RANGE_8_G = +/-8G
# - ADXL345_RANGE_16_G = +/-16G
# For example to set to +/- 16G:
#accel.set_range(Adafruit_ADXL345.ADXL345_RANGE_16_G)
# Or change the data rate to one of:
# - ADXL345_DATARATE_0_10_HZ = 0.1 hz
# - ADXL345_DATARATE_0_20_HZ = 0.2 hz
# - ADXL345_DATARATE_0_39_HZ = 0.39 hz
# - ADXL345_DATARATE_0_78_HZ = 0.78 hz
# - ADXL345_DATARATE_1_56_HZ = 1.56 hz
# - ADXL345_DATARATE_3_13_HZ = 3.13 hz
# - ADXL345_DATARATE_6_25HZ = 6.25 hz
# - ADXL345_DATARATE_12_5_HZ = 12.5 hz
# - ADXL345_DATARATE_25_HZ = 25 hz
# - ADXL345_DATARATE_50_HZ = 50 hz
# - ADXL345_DATARATE_100_HZ = 100 hz (default)
# - ADXL345_DATARATE_200_HZ = 200 hz
# - ADXL345_DATARATE_400_HZ = 400 hz
# - ADXL345_DATARATE_800_HZ = 800 hz
# - ADXL345_DATARATE_1600_HZ = 1600 hz
# - ADXL345_DATARATE_3200_HZ = 3200 hz
# For example to set to 6.25 hz:
#accel.set_data_rate(Adafruit_ADXL345.ADXL345_DATARATE_6_25HZ)
print('Printing X, Y, Z axis values, press Ctrl-C to quit...')
while True:
# Read the X, Y, Z axis acceleration values and print them.
x, y, z = accel.read()
print('X={0}, Y={1}, Z={2}'.format(x, y, z))
# Wait half a second and repeat.
time.sleep(0.25)