How to setup the Raspberry Pi to interface with multiple servos utilizing a 16 channel servo controller along with Adafruit’s Servo Driver Library.
*Note – Servo Controller input voltage should be 5-6 volts instead of the suggested 9 volts
PARTS:
RPI 3 – https://amzn.to/2VA9pQY
4 Amp Power Adapter – https://amzn.to/2CTptWu
16GB micro SD – https://amzn.to/2SFMwd3
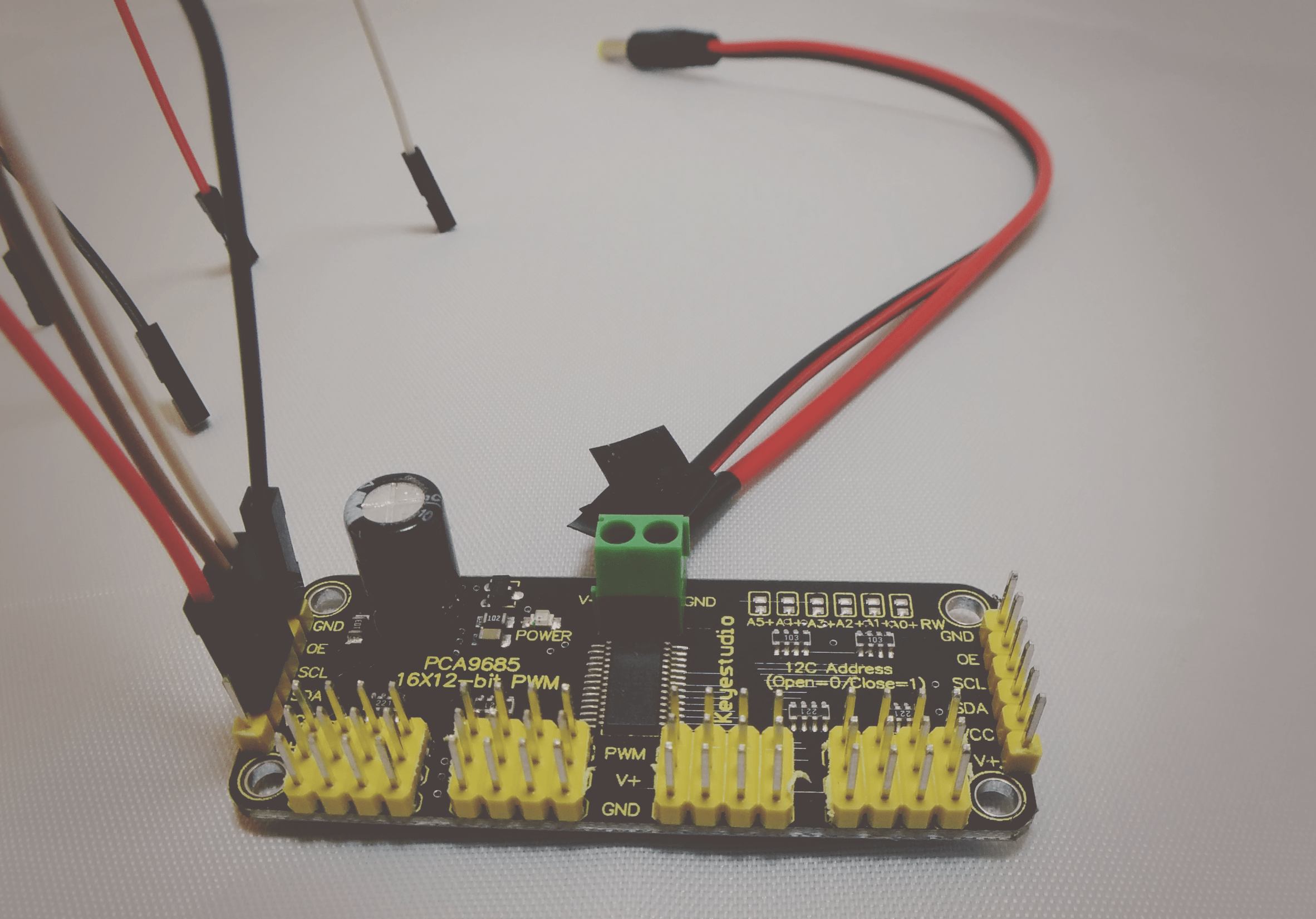
16-Channel Servo Controller: https://amzn.to/2CasoIK
6 x 1.5V AA Battery Holder: https://amzn.to/2LW10mq
5.5×2.1mm Male+Female DC Power Socket: https://amzn.to/2VA5ZNW
120 pcs jumper cable: https://ebay.to/2VAb9cY
9g Servos: https://amzn.to/2VAvcrF
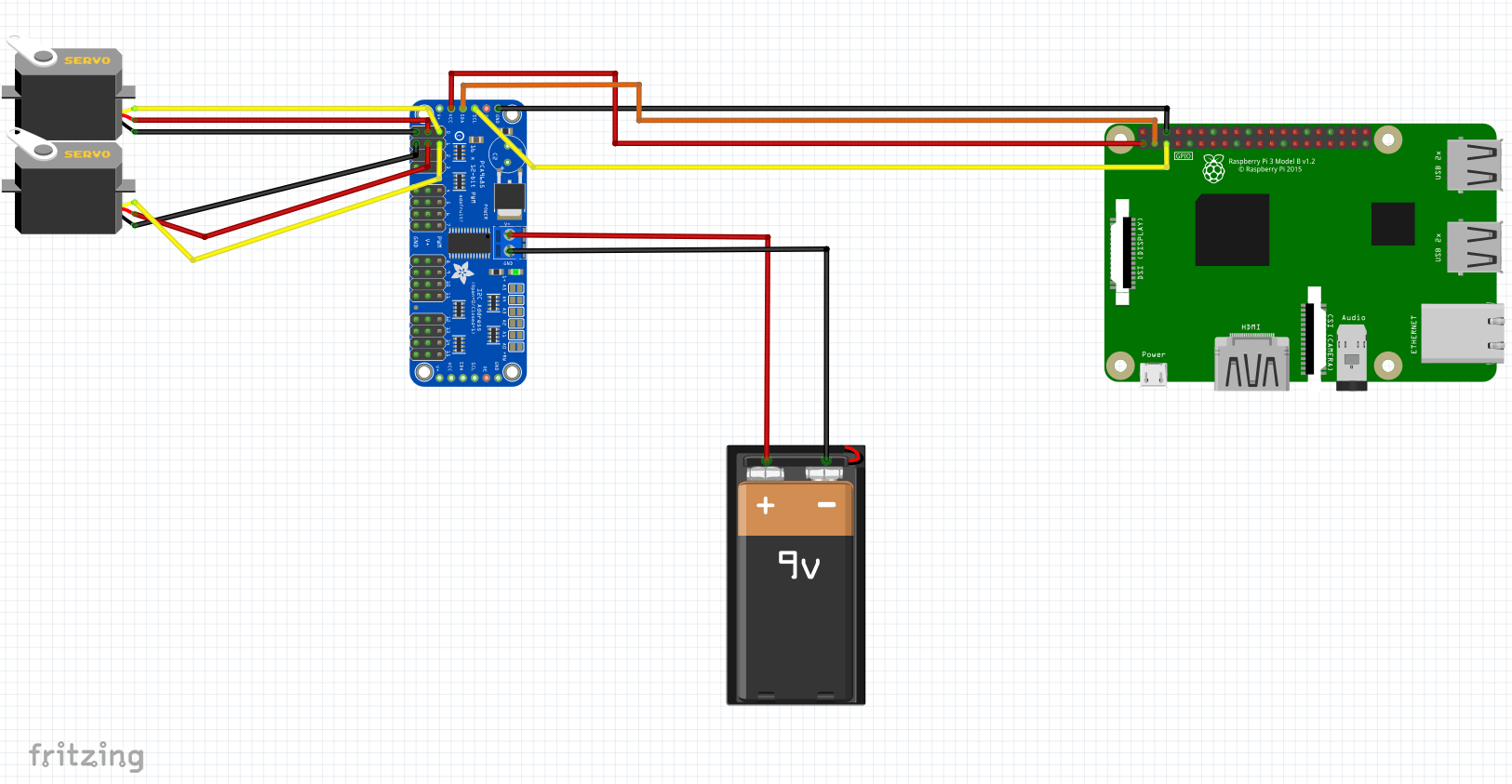
SCHEMATIC:
MODIFIED CODE:
Original Git Project: https://github.com/adafruit/Adafruit_Python_PCA9685
import time
# Simple demo of of the PCA9685 PWM servo/LED controller library.
# This will move channel 0 from min to max position repeatedly.
# Author: Tony DiCola
# License: Public Domain
from __future__ import division
import time
# Import the PCA9685 module.
import Adafruit_PCA9685
# Uncomment to enable debug output.
#import logging
#logging.basicConfig(level=logging.DEBUG)
# Initialise the PCA9685 using the default address (0x40).
pwm = Adafruit_PCA9685.PCA9685()
# Alternatively specify a different address and/or bus:
#pwm = Adafruit_PCA9685.PCA9685(address=0x41, busnum=2)
# Configure min and max servo pulse lengths
servo_min = 150 # Min pulse length out of 4096
servo_max = 600 # Max pulse length out of 4096
servo_mid = 350
# Helper function to make setting a servo pulse width simpler.
def set_servo_pulse(channel, pulse):
pulse_length = 1000000 # 1,000,000 us per second
pulse_length //= 60 # 60 Hz
print('{0}us per period'.format(pulse_length))
pulse_length //= 4096 # 12 bits of resolution
print('{0}us per bit'.format(pulse_length))
pulse *= 1000
pulse //= pulse_length
pwm.set_pwm(channel, 0, pulse)
# Set frequency to 60hz, good for servos.
pwm.set_pwm_freq(60)
print('Moving servo on channel 0, press Ctrl-C to quit...')
while True:
# Move servo on channel O between extremes.
pwm.set_pwm(0, 0, servo_min)
time.sleep(1)
pwm.set_pwm(0, 0, servo_max)
time.sleep(1)
pwm.set_pwm(1, 0, servo_min)
time.sleep(1)
pwm.set_pwm(1, 0, servo_mid)
time.sleep(1)